- Barajar
ActivarDesactivar
- Alphabetizar
ActivarDesactivar
- Frente Primero
ActivarDesactivar
- Ambos lados
ActivarDesactivar
- Leer
ActivarDesactivar
Leyendo...
Cómo estudiar sus tarjetas
Teclas de Derecha/Izquierda: Navegar entre tarjetas.tecla derechatecla izquierda
Teclas Arriba/Abajo: Colvea la carta entre frente y dorso.tecla abajotecla arriba
Tecla H: Muestra pista (3er lado).tecla h
Tecla N: Lea el texto en voz.tecla n
![]()
Boton play
![]()
Boton play
![]()
17 Cartas en este set
- Frente
- Atrás
- 3er lado (pista)
|
robot
|
elementos o eslabones unidos por articulaciones ,un dispositivo electromecanico con multiples grados de livertad que es programable para realizar una varieda de tareas
|
dispositivo mecanica
|
|
robot industrial
|
es un manipulador multifuncional reprohramable, con varios grados de livertad, capaz de mover materias, piezas, herramientas , o dispositivos especiales ,segun trayectorias, variables, programadas para realizar tareas diversas.
|
capas de mover materiales
|
|
robotica
|
es la ciencia o rama de la tecnologia, que estudia el analisis, diseño y construccion de los robots, en otras palabras la ciencia de los robots
|
ciencia
|
|
grado de livertad
|
cada uno de los movimientos independientes que puede realizar cada articulacion con respecto a la anterior
|
movimientos
|
|
articulacion
|
el dispositivo que permite el movimiento relativo entre dos partes solidas, proven al robot de por lo menos un grado de livertad, permiten al manipulador realizar movimientos
|
dispositivo
|
|
transmision
|
elementos encargados de transmitir el movimiento desde los actuadores hasta las articulaciones.
|
transmiten el movimiento
|
|
estructura mecanica de un robot
|
|
partes
|
|
reductores
|
su mision es adaptar el par y la velocidad de la salida del actuador a los valores adecuados para el movimiento de los brazos del actuador, su objetivo es la elevada precision y buena velocidad de posicionamiento del robot.
|
precision
|
|
actuadores
|
proporcionan fuerza ,torque para el movimiento del robot, son los encargados de dotar de movimiento a la estructura mecanica.
|
mueven
|
|
sensores
|
lee las variables reales, es decir capta señales del entorno, en el movimiento del robot para su uso en control y las convierte en magnitudes utiles para el analisis
|
capta del entorno
|
|
elemento terminal(gripper)
|
es un dispositivo que se une a la muñeca del brazo del robot con la finalidad de activarlo para realizar una tarea especifica
|
aparato final
|
|
robot carteciano
|
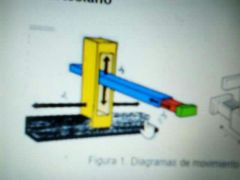
espacio de trabajo es un cubo, tiene tres grados de livertad(son los movimientos en x y z), articulaciones prismaticas
|
x y z
|
|
robor cilindrico
|
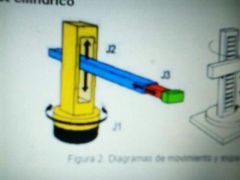
tiene tres grados de livertad,un movimiento de rotacion sobre una base, una articulacion prismatica y otra igual para el radio, espaciis de trabajo redondos, se mueve en cordenadas cilindricas(a, p,z)
|
a p z
|
|
robot esferico polar
|
tiene dos juntas de rotacion y una prismarica , tiene tres grados de livertad, movimientos rotacional,angular, y lineal, volumen de trabajo iregular
|
lineal , rotacional y angular
|
|
robot scara
|
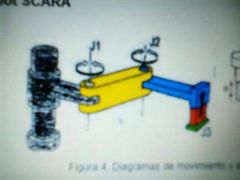
similar al cilindrico pero tiene dis articulaciones de ritaciob, un actuadir y tres grados de livertad, movimientos horizontales y lineales
|
2 cilindricas
|
|
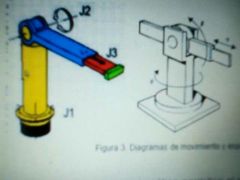
robot antropomorfico
|
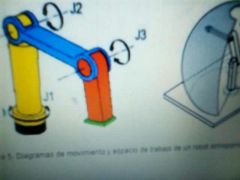
3 articulaciones de posiciinamiento y tres de orientacion, tiene 6 grados de livertad, tres para orientacion y dos para direccion, espacio de trabajo esfera
|
brazo
|
|
tipos de articulaciones
|

ritacional, prismatica, tornillo, ubiversal,cilindrica,planar ,esferica
|
rodilla
|